







 咨询服务
咨询服务 帮助中心
帮助中心 联系我们
联系我们
 技术资讯
技术资讯 飞思课堂
飞思课堂 精彩活动
精彩活动

PAIN PIONTS

多智能体系统平台设计工具链复杂庞大,从零开始搭建费时费力,使用不够便捷。

缺乏系统性的平台搭建,有的只是设备的拼凑,并未形成统一的体系。

现有各分散的软硬件存在使用标准、软件接口、通讯协议不统一,相关源码不开放,学习掌握和二次开发难度较大的缺点。

对于非专业领域的人员,缺乏体验互动的能力,不能参与其中,不能激发学习兴趣。

由于平台搭建缺乏系统性,间接也导致在教学资源上存在资源配套不完整,或者相互之间并无联系,不能做到前后呼应,承上启下,从而不能让学生快速掌握专业技能。
solution

飞思实验室基于标准教研无人机产品,提出多智能体协同创新实验室解决方案,实验室作为支撑载体服务于例如自动化、机器人工程、人工智能等相关专业的建设与人才培养,为学生实践提供教学环境。
在满足专业建设人才培养的基础上也兼顾了科研团队的创新研究。同时,卓翼智能配套提供一站式的教学服务支持,为高校在专业建设及相关课题研究,提供更好的支撑。
Architecture diagram
飞思实验室在智能体教学闭环中,融入智能体的信息感知、任务分配、轨迹规划、编队控制、多智能体任务分配、多智能体编队控制等技术内容和实验内容,从而提升学生的综合实践能力。
Teaching advantages




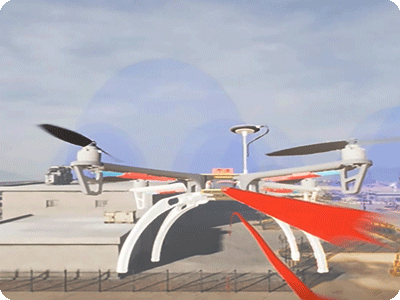
单智能体实验区,具体讲解无人机、无人车、分拣机械臂等主流多智能体的基本理论及基本实验,为学生从入门到精通奠定良好基础。

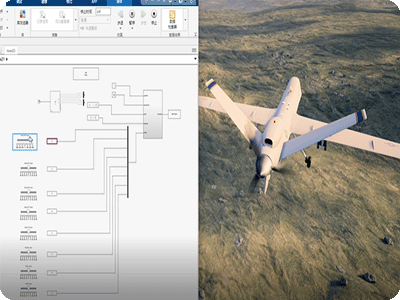
飞思无人系统仿真开发平台是在北航可靠飞行控制组提出的RflySim仿真框架的基础上开发的一体化无人机系统仿真开发平台,专为无人平台控制系统开发、大规模集群协同、人工智能视觉等前沿研究领域研发的一套高可信度的无人控制系统开发、测试与评估平台。基于此平台可完成飞控仿真教学、集群仿真教学、视觉仿真教学。通过平台完成在仿真环境下的算法学习与验证,掌握基本MATLAB/Simulink编程能力与常用算法应用能力,为实际飞行测试打好基础。

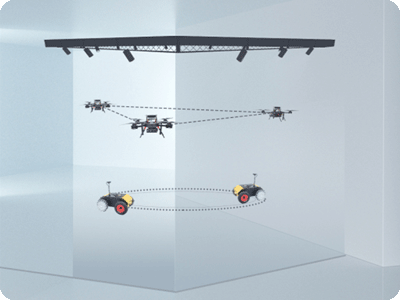
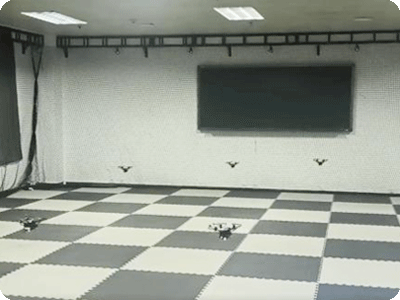
多智能体协同创新实践区主要由室内光学定位系统、多智能体协同控制系统、集群协同无人机、集群协同无人车四部分组成。包含室内光学定位系统1套,为无人机提供高精度豪米级跟踪定位能力,多智能体协同控制系统1套,提供无人系统协同控制与任务规划能力,集群协同无人机N架,集群协同无人车N辆,用于开展多智能体协同任务规划、协同控制等相关研究与教学实验演示。

结合无人仿真系统,通过VR设备和遥控器,体验者可看到无人机的飞行视角,让学生身临其境的的感受飞行的乐趣,带来全新的沉浸感受。同时,可以锻炼学生的模拟飞行技能,练习各种飞行动作,为未来的实际飞行打下基础。

Cases















