







 咨询服务
咨询服务 帮助中心
帮助中心 联系我们
联系我们
 技术资讯
技术资讯 飞思课堂
飞思课堂 精彩活动
精彩活动


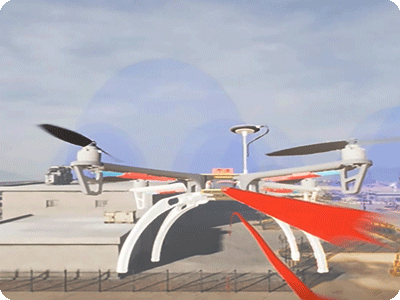
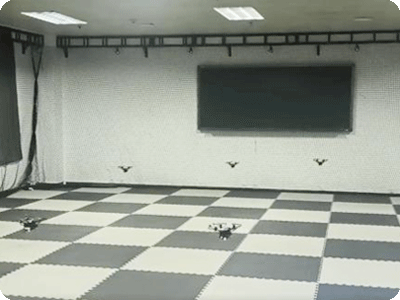
飞思X150无人机平台是专为无人机行业开发者和科研工作者打造的一款小型室内集群飞行器。
使用高强度碳纤维和3D打印技术相结合设计制造。载重大,飞行时间长。
内部采用激光定高,性能优秀,飞行稳定,使用简单,一键起降。
主要应用于协同编队、分布式集群控制、slam导航、视觉跟随、目标识别、人工智能应用等领域
专为集群智能而生,使用高强度碳纤维和3D打印技术相结合设计制造,将强大飞行性能注入机身中,使用顶尖飞控算法,保障飞行安全性与稳定性。
搭载TX2、NUC做机载处理板卡;同时搭载双目相机、可见光相机、红外摄像头;可选配wifi通讯系统、远距离数传系统;支持GPS、RTK、UWB导航定位;,提供更优秀避障性能,稳定飞行,乐享飞行。
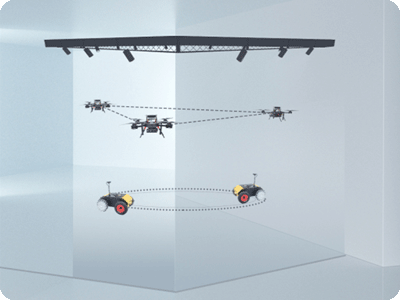
搭载机载无人机集群控制、通讯模块;支持无人机集群控制;能够进行协同搬运;可与无人车结合进行天地一体协同编队控制。

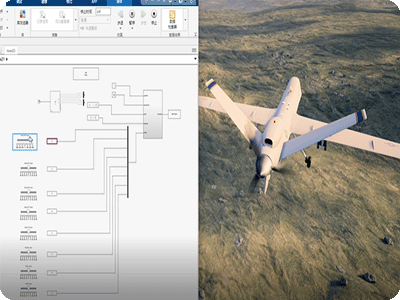
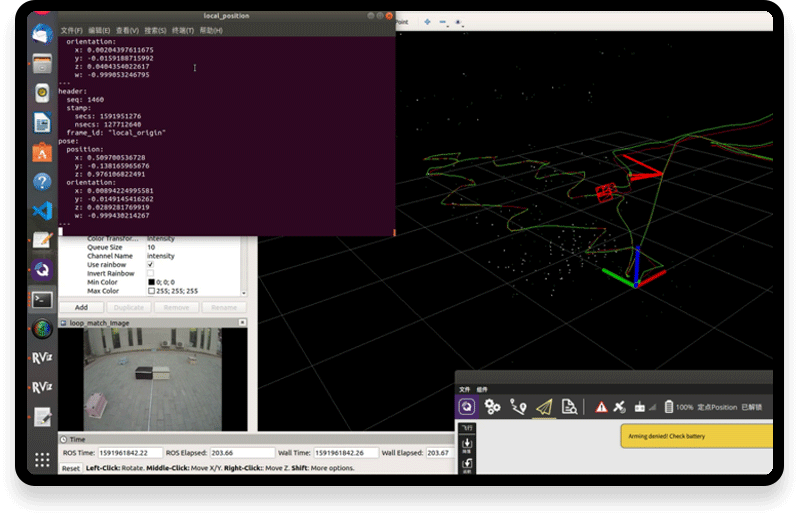
支持基于模型设计开发;支持ROS、C++二次开发;支持matlab二次开发;可作为视觉slam导航、激光slam导航开发平台;可作为视觉导航、目标识别、目标跟随等人工智能算法开发平台;可搭载TX2、NUC做机载处理板卡。

享有自主知识产权的无人机二次开发平台,支持基于模型设计开发
支持ROS二次开发;支持MATLAB二次开发
享有自主知识产权的
无人机二次开发平台
享有自主知识产权的
无人机二次开发平台
享有自主知识产权的
无人机二次开发平台

多种应用领域,支持实现室内无人机集群控制、天地协同集群控制,支持基于模型设计
无人机搭载通讯模块和集群控制,可进行室外无人机集群控制;支持机载分布式集群控制算法开发及算法验证;可与无人车协作进行天地一体化协同控制;多机可进行协同搬运。
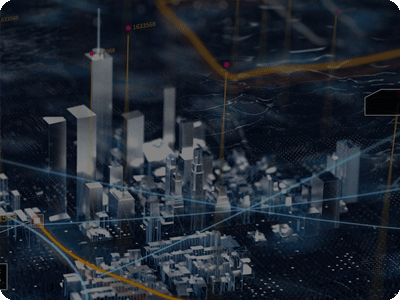
无人机可搭载双目相机、可见光相机,同时搭载机载视觉处理板卡,进行双目视觉slam导航;可搭载激光传感器,进行激光slam导航。主要用于室外地图构建和导航工作。
无人机可搭载红外摄像头、可见光摄像头,能够进行目标识别、目标跟随。无人机可进行人工智能开发,支持ROS、C++和matlab二次开发。


| 尺寸(不含桨) | 567*567*400mm |
| 对称电机轴距 | 680mm |
| 整机重量(含电池) | 4025g |
| 额外最大载重 | 2000g |
| 通讯接口 | WiFi、TTL |
| 电池 | 6s,10000mAh |
| 最大上升速度 | 2m/s |
| 最大下降速度 | 2m/s |
| 最大水平飞行速度 | 12m/s |
| 最大起飞海拔高度 | 5000m |
| 续航时间(空载) | 40分钟 |
| 工作环境温度 | -20°C至 50°C |





