







 咨询服务
咨询服务 帮助中心
帮助中心 联系我们
联系我们
 技术资讯
技术资讯 飞思课堂
飞思课堂 精彩活动
精彩活动


飞思Rover1是面向无人车系统开发领域的一款智能无人车,车身采用高强度铝合金设计,载重量大、减震性能强、运行稳定。
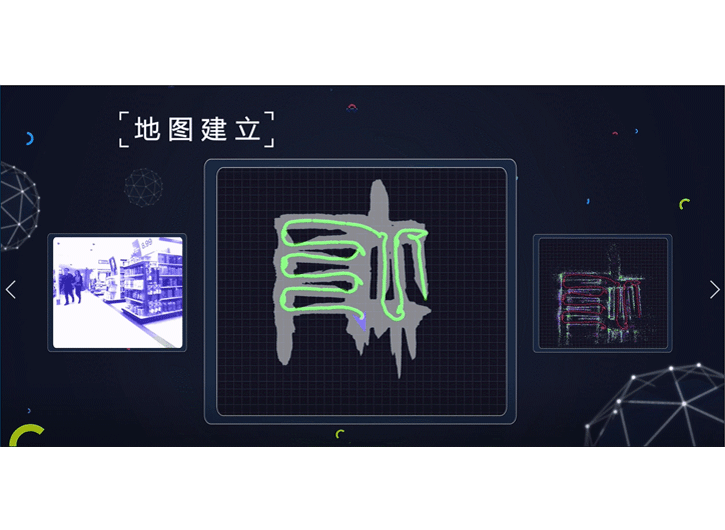
搭配全套传感器及导航软件,支持双目视觉SLAM导航 激光SLAM导航。
无人车可搭载红外摄像头、可见光摄像头,能够进行目 标识别、目标跟随。
代码全部开源、极大降低了用户的使用门槛,用户可快 速上手学习或二次开发。
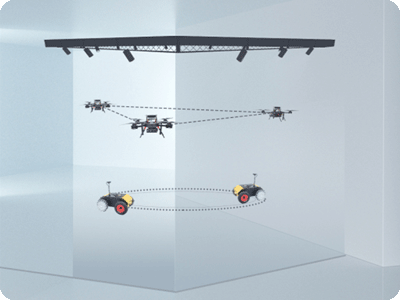
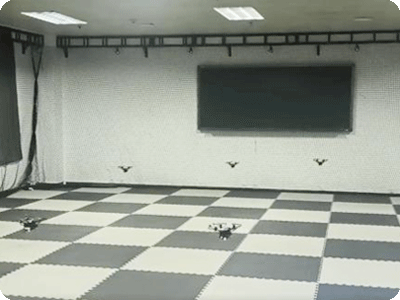
搭载通讯模块和集群控制,可进行室内无人车集群控制;
支持机载分布式集群控制算法开发及算法验证;可与无人机协作进行天地一体化协同控制。
无人车可搭载双目相机、可见光相机,同时搭载车载视觉处理 板卡,
进行双目视觉SLAM导航;可搭载激光传感器,进行激光SLAM导航。
主要用于室内地图构建和导航工作。
无人车可搭载红外摄像头、可见光摄像头,能够进行目标识别、目标跟随

代码全部开源 快速上手学习或二次开发
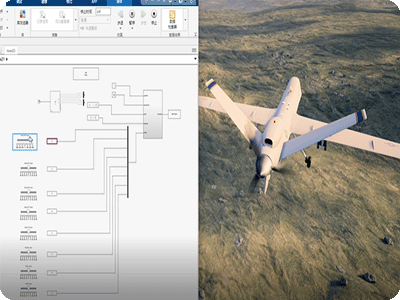
可搭载TX2、NUC、树梅派等车载处理板卡;
支持人工智能开发支持车载分布式集群控制算法开发;
支持ROS二次开发;支持matlab二次开发;
可作为视觉slam导航、激光slam导航开发平台;
可作为目标识别、目标跟随等人工智能算法开发平台;
享有自主知识产权的
无人机二次开发平台
享有自主知识产权的
无人机二次开发平台
享有自主知识产权的
无人机二次开发平台

多种应用领域,支持实现室内无人机集群控制、天地协同集群控制,支持基于模型设计
无人车搭载通讯模块和集群控制,可进行室内无人车集群控制;支持机载分布式集群控制算法开发及算法验证;可与无人机协作进行天地一体化协同控制。
无人车可搭载双目相机、可见光相机,同时搭载车载视觉处理板卡,进行双目视觉slam导航;可搭载激光传感器,进行激光slam导航。主要用于室内地图构建和导航工作。
无人车可搭载红外摄像头、可见光摄像头,能够进行目标识别、目标跟随。无人车可进行人工智能开发,支持ROS和matlab二次开发。


| 尺寸 | 425*300*160mm |
| 整机重量(含电池) | 5.5kg |
| 底盘高度 | 50mm |
| 车轮 | 后置麦克纳姆轮直径150mm |
| 最大载重 | 5KG |
| 电池 | 12V 10000mAh |
| 通讯接口 | WIFI |
| 最大行驶速度 | 1m/s |
| 续航时间(空载) | 1小时 |
| 工作环境温度 | -20°C至 50°C |





