





 咨询服务
咨询服务 帮助中心
帮助中心 联系我们
联系我们
 技术资讯
技术资讯 飞思课堂
飞思课堂 精彩活动
精彩活动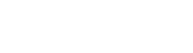
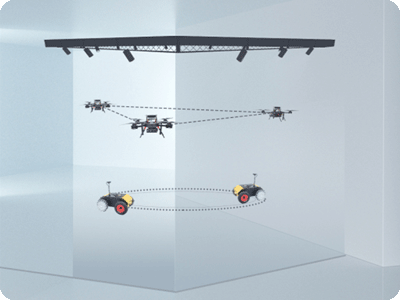
由飞思实验室专为无人机集群协同研究而开发,能够让学校实验室更加专注于算法研究工作,检验理论成果,提升实验效率,极大地推动教学研一体化进程,加速教学和科研的进度。

整个研究框架扩展到所有的无人控制系统,形成一个标
准的自动开发、测试与评估框架体系
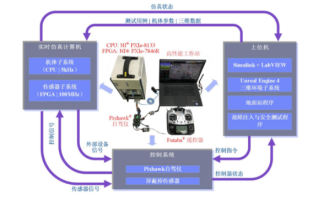
在Windows平台下进行一键安装、一键代码生成、一键固件部署、一键软硬件在环仿真和快速实飞, 非常方便易用。用户不需要了解飞控源码、Linux编程、C/C++编程、网络通信、飞机组装等底层知识,只需具备基础的Simulink(或Python)知识,即可快速将自己的算法经过层层验证并应用于真机上,有助于更专注于算法的开发与测试。

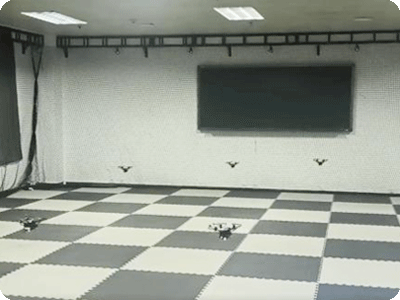
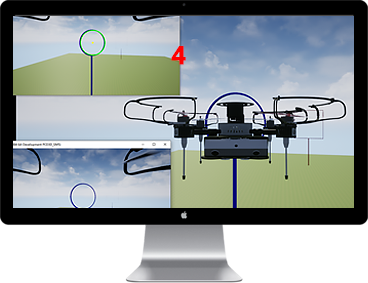
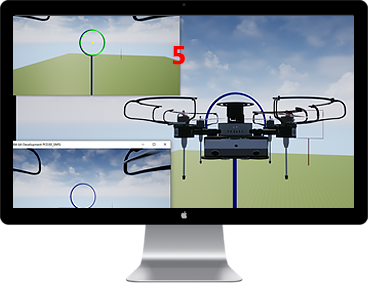
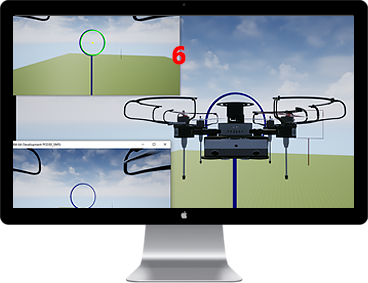
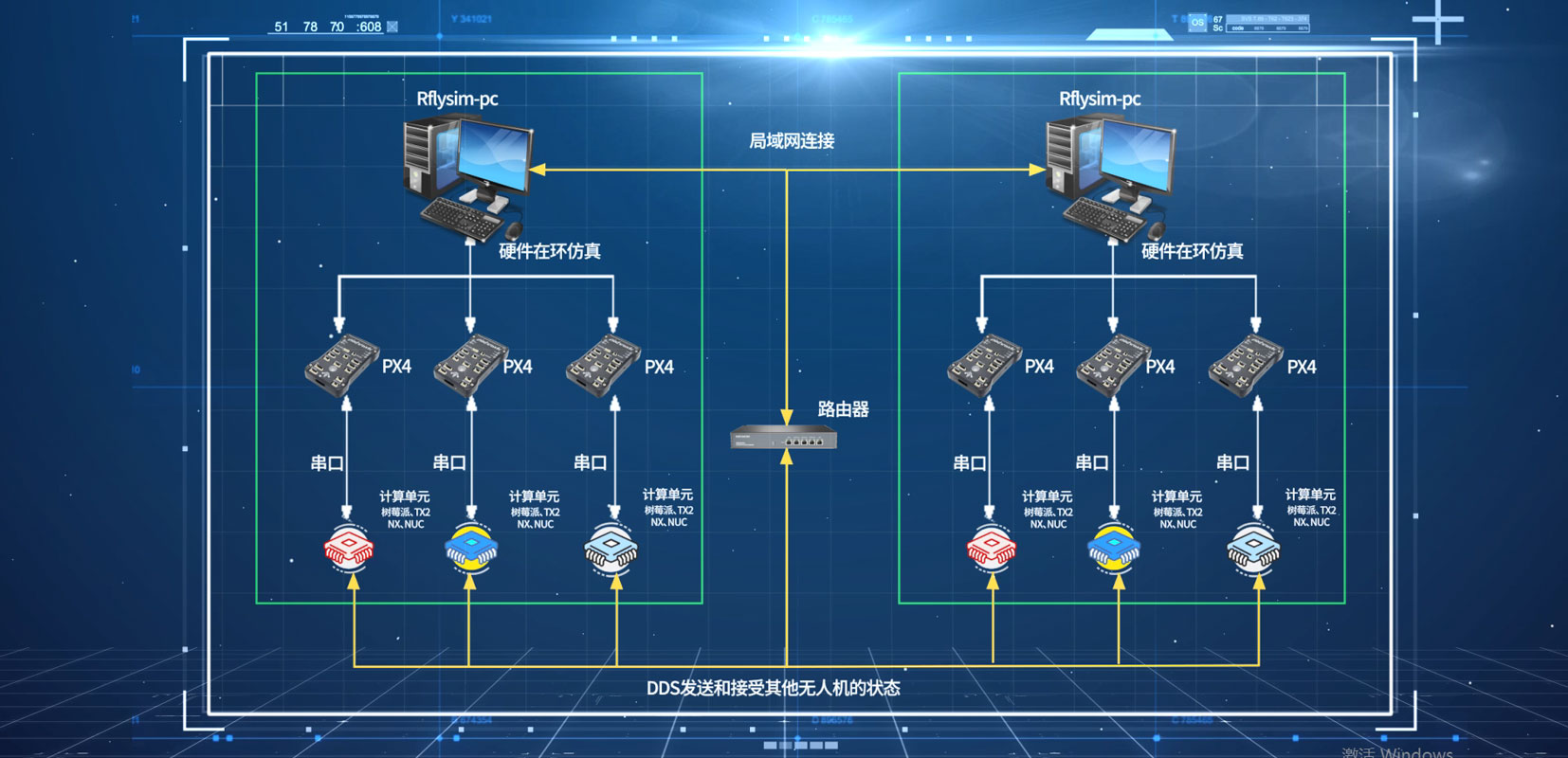
RflySim的构架完全是分布式的。RflySim中的所有应用软件都可以在同一台或多台电脑上多开, 并且各个应用之间可以通过UDP网络相互收发消息。这种分布式的构架非常适合于大规模带视觉的 无人机集群仿真测试。
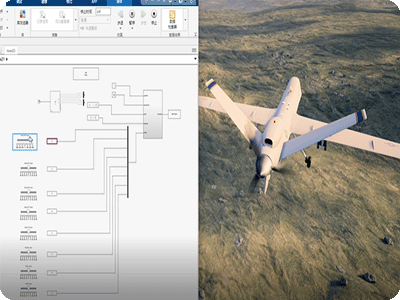
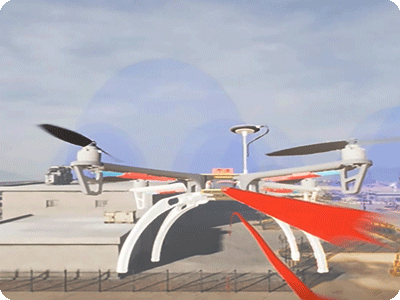
RflySim支持小车、固定翼、垂直起降飞行器(VTOL)等多种机型。 用户可以在Simulink中根据规范的接口搭建机架模型,然后自动生 成DLL文件用于HIL仿真。进一步实验平台能被拓展到任意无人系统中。

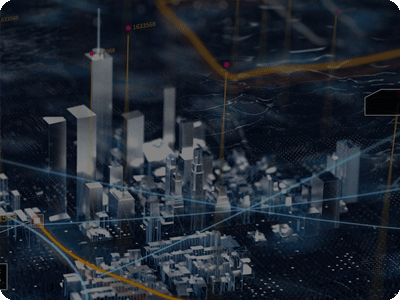
我们提供了源码和教程帮助用户在虚幻4 (Unreal En gine 4 ,UE4)中搭建高度逼真的3D场景,用于室内外 环境仿真或者基于视觉算法的开发。

| 固件版本 | PX4 1.7.3+1.8.2 |
| 编译器 | MSys2 |
| 支持系统 | 底层飞控算法开发:Win7及以上版本 |
| 配置要求 | 低 |
| SIL/HIL仿真模式 | PX4硬件在环仿真 |
| PX4自动代码生成 | 支持,限1.7~1.8版本固件,对最新硬件可能存在兼容性问题 |
| UE4三维视景引擎 RflySim3D | 不支持 |
| CopterSim导入Simulink 生成DLL模型以适配其他机型 | 不支持 |
| CopterSim集群功能 | 不支持 |
| CopterSim联机多台电脑 分布式仿真 | 不支持 |
| CopterSim连接嵌入式电脑进行 视觉硬件在环仿真 | 不支持 |
| 固件版本 | PX4 1.7.3+1.8.2 |
| 编译器 | MSys2 |
| 支持系统 | 底层飞控算法开发:Win7及以上版本 |
| 配置要求 | 低 |
| SIL/HIL仿真模式 | PX4硬件在环仿真 |
| PX4自动代码生成 | 支持,限1.7~1.8版本固件,对最新硬件可能存在兼容性问题 |
| UE4三维视景引擎 RflySim3D | 不支持 |
| CopterSim导入Simulink 生成DLL模型以适配其他机型 | 不支持 |
| CopterSim集群功能 | 不支持 |
| CopterSim联机多台电脑 分布式仿真 | 不支持 |
| CopterSim连接嵌入式电脑进行 视觉硬件在环仿真 | 不支持 |